XPilot 3.0 ������ I ��
�������Ѿ��Ⱥܾ��ˡ�2018����ף�ǰ��ͨ�Զ���ʻ���������������С��������С���Զ���ʻ���ܲã�ͳ��С���Զ���ʻ�������з���
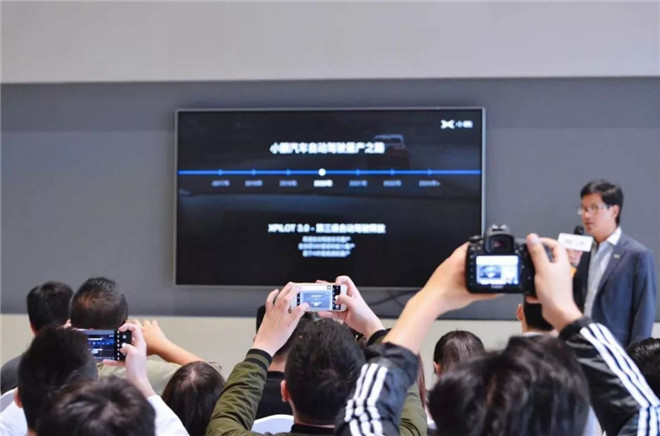
����֮�������ܲɷ�˵��������Ϣ�㣬һ��С��E28���ͣ���������֪���ˣ������Ϻ���չ�����С��P7�������SAE L3���Զ���ʻϵͳ��������˵С����һ���Զ���ʻϵͳ����ȫ�����������֪������

С��P7����I�Ϻ���չ
��˵��֪������վ��2019�꣬������������ĸ���/�Զ���ʻϵͳ�������Ϲ�Ӧ���з���ֱ�Ӵӹ�Ӧ�̴��ɹ��ģ�ѡ�������з��ij�����֮���٣����������з��ij����У�ѡ����ȫ����������֪�����ģ���ĿǰΪֹ��ֻ����˹��һ�ҡ�
С��Ҫ�ƿ�Mobileye���ڶ��ң�����ʶ������һ��ʲô�������ս����
��˵L3���Զ���ʻϵͳ��2017�꣬�¿�µ�A8����ҵ֮����������L3���Զ���ʻϵͳ������֮��������ҵ��������Ϊ���Ǹ��dz����Ӿ���ļ������⡣
��η�������ҵ����ʵõ���������ֵ����ɡ��������ݺ���С������XPilot 3.0 �IJ�Ʒ�����ܡ���Ӳ������ϸ�ڣ�Enjoy it.
XPilot Ӳ��һ��
����һ�仰�ܽXPilot 3.0��ȫ��ҵ��ǿ������ʻӲ���ܹ����������£�
Ӣΰ��Xavier �Զ���ʻоƬ
12��������������
5���߾��Ⱥ��ײ��״�
13���Զ���ʻ����ͷ
1����������ͷ
�߾��ȵ�ͼ
�߾��ȶ�λ�ں�
�������Ǿ���������������Ӣΰ��Drive Xavier �Զ���ʻоƬ��2018 ��CES �ϣ��˵��̸�����ѫ˵���оƬ��Ӣΰ��Ⱦ��������������ꡣ
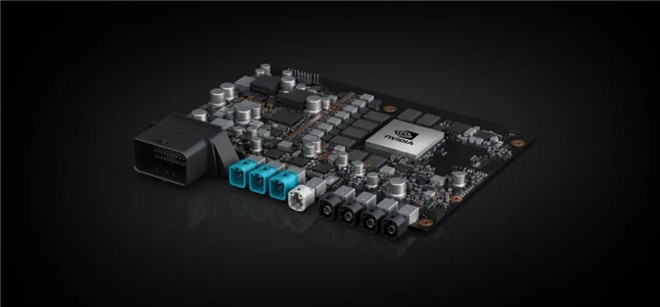
XavierоƬIӢΰ�����
����ʲô�����أ���˹��Autopilot HW 2.0/2.1/2.5��ȫϵ������Ӣΰ��Drive PX2оƬ��Xavier��PX2����һ����Xavier�������ﵽ30 Tops��������ֻ��30W����Ч��PX2����������15����
�������ĽǶȣ�Xavier������������˹��Q2������������ص�FSDоƬ��144Tops������ȫ��ҵ�����Զ���ʻоƬ�������ڶ���
12�������������������Ǹ�����ʻϵͳ�ı��䣬�ԡ�
5���߾����״1��ǰ���״4�����״����Ϊ����ġ��߾��ȡ������������������������⣬XPilot 3.0�������ز�����������ײ��״��Ե��Ĵ���������״���ӳ��Ǵ�90°����100°��������1G����1.5G��ͬʱ̽�����ͽǾ���Ҳ����Ӧ������

���Ĵ����ײ��״� I ��������
������״�Ը�֪���ܵ��������Զ����ģ������ܶ����10����̽��ʱ�䡢���롢���ȡ��ֱ���ȫ����������42HOW����õ�����Ϣ�����ܹ����������࣬������С������һ��ͷ�����쳵��˾����һ���Զ���ʻϵͳҲ����ز���������״�ţ������Dz���������ġ�
�����������ذ���13������ͷ������ǰ��4������ͷ��1����Ŀ����ͷģ���1��ǰ�ð�ȫ��������ͷ��5����ǿ��֪����ͷ���������������������һ�������Լ�4����������ͷ������13����
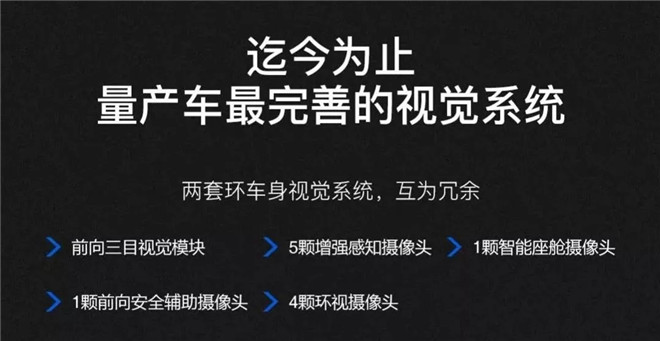
ȫ������ͷIС���ٷ���
��һ�����⣺ǰ����ô���4������ͷ��ʵ���ϣ�����һ������˹��ʽ����Ŀ����ͷ��һ����Ӧ���ṩ�ĵ�Ŀ����ͷ�������������˵�����������ͷ�������Ǹ�֪�����࣬Ҳ���ǵ���Ŀ�ڼ��������ʧЧ��ʱ���������ͷ�ͻᶥ��ȥ��

Autopilotǰ����ĿI��˹������
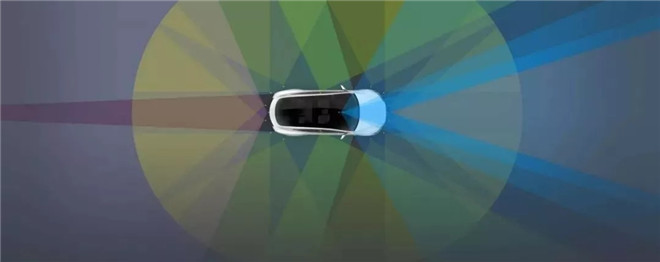
�ڶ���5����ǿ��֪����ͷ����������һ�����⣺����Ҫ��ʲô������ʵ�ֳ�������ͺĸ�֪����˹���Ĵ�������ͷ��ε���Ĵ��Ǻ��ײ��״С���Ĵ��ǡ���ȫ��Ҫ��������ǰ��ĺ��ײ��״�IJ��֣�С��XPilot 3.0���������ͷ�����ײ��״�ȫ��360°�����Ǹ��ǡ�
��������Ȼ�Ѿ������Ǹ��ǣ�Ϊʲô�ֶ����4����������ͷ��4����������ͷ����360°Ӱ����Զ��������ܵ�ʵ�֡��������ʾ��С��ҲΪ���ʹ������ܹ����Ӷ����˷dz���ij��Ժ���֤��������Ҫͨ���������ǿ��֪����ͷ��360°Ӱ����Զ������Ƿdz��dz����ѵġ�
Autopilot����������|��˹������
������˹������û���ṩ360°Ӱ���Զ�������������Ҳ�Ƚϲһ��������Ϊ�����ع���ϡ����˹���ܲ�û�п����������ܵ�����ѹ������һ������������ܹ����µĸ߿����Ѷ�Ҳ�кܴ��ϵ��
�����1����������ͷ���߾��ȵ�ͼ�߾��ȶ�λ�ںϣ����������Է�����һ���˵��ͬ������ġ��߾��ȡ����Բ��飬С��XPilot 3.0ͨ��һ��RTK �IJ�ּ�һ��˫Ƶ���������߾��ȵ�IMU���ټ��Ϲ�Ӧ���ṩ�ĸ߾��ȵ�ͼ�������˷dz���ȷ�Ķ�λ�����������߶���Ϊ��L3���Զ���ʻ�����õġ�
����˵���������������ۺϾ�����ߵĶ�λģ�飬���߾���ͼ�ķֱ��ʿ�������������ͬ�����������ϵ���߾��ȡ�
һ�仰�ܽС��XPilot 3.0��Ӳ������ȷʵ�dz����ţ����֡����Ͽ�ħ���Ĵ���XPilot 3.0�ĺܶ�ϸ��ָ�궼Υ���˹�淨�������Ǿ仰���������˹����FSDоƬ��̸��˵XPilot 3.0Ӳ���ܹ�ȫ��ҵ��ǿ��ʵ�����顣
˭���ɾ�XPilot 3.0��
�������⣬��XPilot 3.0��С��P7��2020��Q2��Ҫ�����ˡ�����ǿ���Ӳ���ܹ�����Ҫ��ƥ������������ŶӲ��ܳɾ�Ta��
��ô��С�����Զ���ʻ�������������˶���Ͷ���أ�
������С���Զ���ʻ���ŵĺ��ĸ߹ܡ�
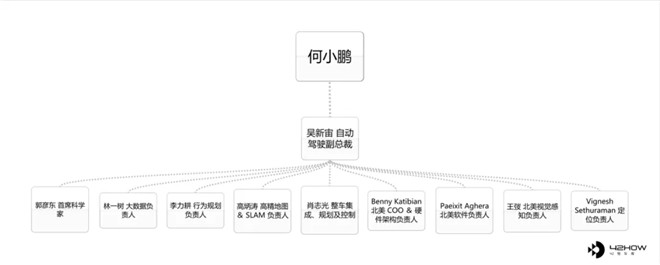
С���Զ���ʻ��֯�ܹ�I42HOW
���쳵��˾��ϲ��������ǿ��ȫ���֣���ν���ں��ʵĵط�Ѱ��������˲š�������С������ͬһ��ҵ��칫��˷�ɢ�Ļ��治�����
������9���У���ϯ��ѧ�ҹ��嶫ͬʱҲ�DZ����ŶӸ����ˣ��߾���ͼ��SLAM �����˸߱������Ϻ��ŶӸ����ˣ���һ����Ф־���쵼�����Ŷӣ�������Base �ڹ�ȣ�����Benny Katibian��Paeixit Aghera��Vigensh SethuRamanʦ����ͨ��Base��ʥ���Ǹ磬��ǰ��ͨ�Զ���ʻ�Ŷӵĺ��ij�Ա��
���һλС�������Ӿ���֪���������|��ԭ�����Զ���ʻ��ҵ��˾Drive.ai ���ϴ�ʼ�ˣ�2019��6�£�ƻ���Բ�����7700����Ԫ�չ���Drive.ai����Լ��ͬһʱ�ڣ����|������С�������Զ���ʻ�Ŷӡ�
���˸߹ܣ��Ŷ�����Ĺ�ģҲ�ڿ���������һ����Դ��������ǰ���̬�п������ߡ���3��13��С������������������˵�ʱ��������Ŷӹ�ģ��˵�����ǡ��ӽ�200�ˡ�������24�յķ������ϣ���һ�����Ѿ��������ŵ��ˡ�һ����320���ij�Ա����
������˵˵С���Ĺ����ݽ�ͼ����ʵ�������ӣ���2018������С��½��ʵ����L1����ȫ�����з�/ʵ�����ݱջ����Զ�������L2��ң�ز������Զ���������������������������

�����Զ���ʻIС���ٷ���
����2020�����XPilot 3.0��С��P7�����У�С���ƻ�ʵ�ָ����Զ���ʻ����ȫ�����з���360° ��֪������������
������¶��С������������ף�Ҳ����P7�������������ڣ�ʵ���Զ�����������ʻ�����Զ�ʻ��ʻ�������ѵ��ڣ�����·���Զ������������������

�Զ�������ʻ I ��˹������
��һ���ܺ��棬����ġ������Զ���ʻ��ָ����ʲô��ǰ���L3���Զ���ʻ������ʲô��
Ҫʵ��L3������������ǰ���ᵽ�ģ�XPilot 3.0ʵ��������ͷ���״�˫��360°�����Ǹ��ǣ�ͬʱƥ��߾��ȵ�ͼ�Ͷ�λ��֧�֣��Լ���������ͷ�Լ�ʻԱ�ļ�أ��Ӵ������ĽǶȿ���XPilot 3.0�߱���L3���Զ���ʻ�ĸ�֪������
��Σ�������˵��������֧�֡�һ��L3���Զ���ʻϵͳ�������㹻�ḻ�Ĵ��������ݵ�����֧���⣬�����Ч�������ݴ������L3���Զ���ʻϵͳͨ����ܲ��������Ĺؼ���
ͬ��������ǰ���ᵽ��Ϊ��ʵ�ָ�֪���࣬С����ϧ������4������ǰ������ͷ������֮�������������һЩ���棬XPilot 3.0������һ�������ࡣ
���Կ�����ô˵���赲С��L3�����ģ�ֻʣ������ϵͳReady �ͼ�ܲ��ŵ�����
�����˵˵������������㷺���ڵ�һ�����⣺������֪��Ϊ�˹��������ҵ�����ڸ��������ѵ�������Ħ�����ɸ��ٵ����ij�ͻ����2016��10������������˹��Autopilot 2.0����ȫϵ��֧��������FSDоƬ�����վ߱�ʵ���Զ���ʻ������������
����С��XPilot 3.0�Ĺٷ������У����������������ۣ���Ӳ������֧��XPilot3.0������XPilot 4.0�������Ұ����������С�����ܲü���ʱ�������������´𰸡�
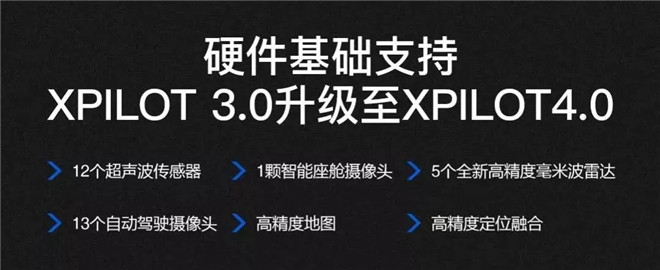
Ӳ����������IС���ٷ���
С��ȷʵ��ע������һ���⣬������Ŀ�IJ�Ʒ�����Ҳ�ᾡ���ܵ������»���˵�����ݣ�����˵����оƬ����˵���Ӹ��»�����Ҳ����װ���ϳ��ϣ�������ЩԤ����
��δ������Ҳ���ں��ʵ�ʱ�䣬��������Ӧ��һЩ������
�⼸����ͬ�ڹ�����XPilot 3.0֧��Ӳ��������
�ڽ�β���Dz�������Ұ�Ŵ�һЩ��ת�Ƶ�С��P7������������XPilot 3.0��С��P7���ӳ���֮ǰ������NEDC600+km�������ٹ������4s���ֲ���Ӣΰ��Xavier+��ͨ����820A˫�콢оƬ��ȫ��ECU OTA��������̫����������......���ܸо�����С����G3С��ţ��֮��P7��ʼ����ȫ���ˡ�
�����г��ĽǶȣ�ȫ�й�����ȫ���������г�����SUV����û�������赲���ͽγ��г����»�������һ����������ʵ���������ǻ��¶��ɣ��������IJ�������Ҳ�γ���һ���г���գ������˶�ȥ����SUV�ˣ�û��һ�����ܻ��̶��㹻����C������γ���
���Ұѻ�˵�ø�����һЩ���ܹ����Model X�Ĺ������ܵ綯SUV�Ѿ���ؿ����ˣ����ܹ����Model S�Ĺ���C�����ܵ綯�γ����㡣
С������ζ����أ�С��P7�����������г������أ��������Ĵ�̫�����ڴ��ˡ�